Multi-step Optimisation#
Introduction#
To be able to face the combinatorial complexity of the problem, without having to simplify / linearize the impact of the
available remedial actions available, the problem is divided into preventive and curative perimeters.
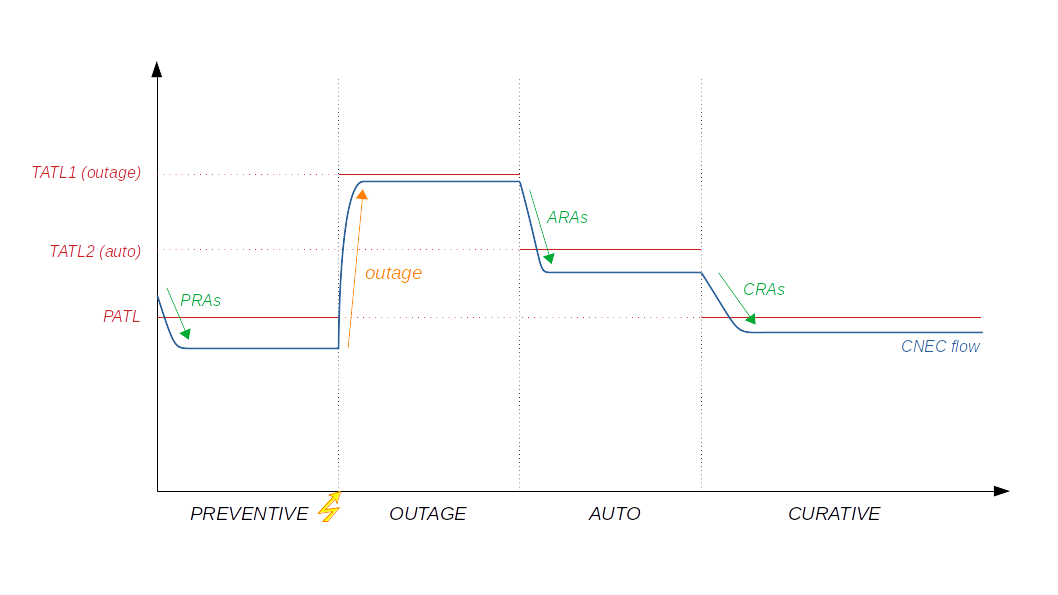
The definition of CNEC and associated usage rules allows to distinguish four temporal situations or instants in the
problem:
“Before outage situation”: immediately before the occurrence of a fault.
“After outage situation”: immediately after the occurrence of a fault and prior to the potential application of post-fault actions (if applicable).
“After automatons”: grid situations which follow the application of automatic remedial actions (automatons) (if applicable) in the case of a particular contingency. Note that this perimeter is simulated, not optimised
“After curative situations”: grid situations which follow the application of curative actions (if applicable) in the case of a particular contingency.
This leads to the consideration of different optimisation perimeters. Each perimeter calls for the application of one set of remedial actions. The preventive perimeter is the first computed. Optimisation will try to maximise the objective function value on this first perimeter (or just secure it, depending on the stop criterion). Then, each contingency in curative defines one perimeter of curative optimisation. Optimisation will try to maximise the objective function value of each of these perimeters (or just secure it, depending on the stop criterion).
Preventive perimeter#
The preventive perimeter is made up of:
CNECs of the “before outage situation” defined with a limit of type PATL (Permanent limit). This corresponds to the so-called “N state” situation.
CNECs of the “after outage situation” defined with a limit of type TATL (Temporary limit).
Overloads potentially reached on this perimeter are to be solved with preventive actions (PRA).
Automaton perimeters#
An automaton perimeter can be defined for each defined contingency. Each automaton perimeter is formed by CNECs of the “after automatons” defined with a limit of type TATL. All CNECs are defined upon the same contingency.
Optimal preventive actions selected by the preventive RAO are applied in this perimeter.
While preventive and curative remedial actions are always optimized to prevent overloads in their respective perimeters, auto remedial actions can actually either be optimized or forced in the automaton perimeter, depending on the usage method. Indeed, in real life an “automated protection” is triggered when an outage takes place, even if its triggering causes another constraint somewhere else in the network. That’s why, regardless of the impacts on CNECs, forced automatic remedial actions are activated if their specific activation conditions are met (e.g. after a given contingency). In CASTOR, this simulation is carried out in three stages, the first two handling specifically the automatic remedial actions for which there is not set-point to compute. These remedial actions are called network actions. They include topological actions, injection set-points, PST set-points, switch pairs.
Automatic network actions simulation#
First, all automatic network actions with a FORCED usage method are applied on the network. FORCED means that no optimization is carried out and that as long as the triggering conditions are met, the remedial action is applied.
Automatic search tree#
Then, the automatic network actions which are available (i.e. not mandatory to apply) are selected by the RAO if they help making the network secure, using a search-tree algorithm (similar to what is done in preventive or curative).
Automatic range actions simulation#
Finally, automatic range actions are applied one by one, as long as some of the perimeter’s CNECs are overloaded. Range actions include PSTs and HVDCs. The remedial actions’ speed determines the order in which they are applied: the fastest range actions are simulated first. Aligned range actions are simulated simultaneously.
Note that auto range actions must have a FORCED usage method.
Automatic range actions’ setpoint is computed using the results of a sensitivity analysis computation, during which the sensitivity \(\sigma\) of a range action on a CNEC is computed. By focusing on the worse overloaded CNEC, we can compute the automatic range action’s optimal setpoint to relieve that CNEC with the following formula:
Name |
Symbol |
Details |
Type |
Index |
Unit |
Lower bound |
Upper bound |
|---|---|---|---|---|---|---|---|
Flow |
\(F(c)\) |
flow of FlowCnec \(c\) |
Real value |
One variable for every element of (FlowCnecs) |
MW |
\(-\infty\) |
\(+\infty\) |
RA setpoint |
\(A\) |
setpoint of RangeAction |
Real value |
One variable for every element of (RangeActions) |
Degrees for PST range actions; MW for other range actions |
Range lower bound[^1] |
Range upper bound[^1] |
This formula is capped by the range actions’ min and max setpoints: if the range action we’re simulating doesn’t achieve relieving the worst CNEC, we’ll push it to its min or max tap and then continue the simulation with the next fastest ARA.
Once the worse overloaded CNEC is relieved, we carry on the simulation focusing on the next worse overloaded CNEC. As soon as all CNECs are secure, we stop applying range actions.
N.B: a range action can only be shifted in one direction. If the previous formula implies moving a range action in the opposite direction (compared to the one it’s already been shifted in), we’ll carry on the simulation with the next fastest ARA.
The simulation can therefore stop for the following reasons:
there are no more overloaded CNECs in the perimeter
all ARAs have been made the most of
either because they have reached their min/max set-points
either because they have already been shifted in one direction and relieving remaining overloaded CNECs would require shifting these ARAs in the opposite direction
a sensitivity analysis computation failed
too many iterations have been performed (security stop criterion)
Unlike automatic network actions, automatic range actions can only be applied as long as CNECs are overloaded because we need to determine the set-point on which they are applied.
Here is an example of the simulation of automatic range actions:

Curative perimeters#
Finally, a curative perimeter can be defined for each defined contingency. Each curative perimeter is formed by:
CNECs of the “after curative situation” defined with a limit of type PATL. All CNECs defined upon the same contingency.
Overloads potentially reached on this perimeter are to be solved with curative actions. Preventive and automatic actions already selected in the “after automatons” situation by the first two steps are applied in this perimeter.
The separation between preventive and curative perimeters is justified by the fact that curative remedial actions often suffice to solve the constraints which may appear in the curative situation (but were not already treated at preventive stage due to a TATL higher than PATL).
Only TSOs owning curative actions allow CNECs to have a TATL which exceeds the PATL value. Operating the system with curative actions allows to overload a line temporarily, thus allowing more flexibility in grid operations.
Operationally, curative actions are sized in order to overcome the difference between these two limits (TATL-PATL).
While during preventive actions, only the TATL has to be respected (active flow should remain below this value),
curative actions (if properly sized), should be able to reduce the active flow in order to respect the PATL value.
When curative actions are not sized properly and are not sufficient to respect the two limits, CASTOR will then
investigate additional preventive remedial actions, by running
a second preventive optimisation.
When no curative actions are available to secure a given CNEC, CASTOR will investigate additional preventive remedial
actions by extending the preventive perimeter.
Therefore, preventive optimisation is more permissive with CNECs defined with a TATL larger than the PATL: this allows
preventive optimisation to focus preferably on CNECs with a low TATL (in particular where TSOs do not define curative
actions).
When switching to the curative problem, the PATL applies, and the potential negative impact of previously found
preventive actions (limited by the consideration of TATL) should be overcome by the available curative actions.
In the example below, preventive actions applied might have a negative impact on a particular CNEC (if the objective function value can be increased through the application of this action) when compared with the initial situation:
The flow in “1- initial situation” is lower than in “2- after outage”, the margin is positive in both situations (PATL for 1, TATL for 2). But flow in situation 2 is higher than in situation 1 on this particular CNEC.
When studying the flow in curative (“3- After curative”), PATL applies, and the CNEC is initially seen in overload against this limit due to applied preventive actions. Curative actions should then normally make the flow go below the PATL value.

Extension of the preventive perimeter to the curative situation#
When a CNEC is monitored in a curative state for which no remedial action exists, this CNEC has no chance of being
explicitly secured by remedial actions other than preventive.
The availability of curative actions is first assessed prior to the preventive optimisation:
In the case where no curative action is available for a given CNEC which is to be optimised in the curative problem,
the curative CNEC will be treated directly within the preventive optimisation perimeter (outage 2 in figure below).
As a result, the current limit considered in the preventive optimisation of this particular CNEC will be the PATL
and not the TATL.
This ensures that the optimisation avoids finding a preventive solution where the flow of this CNEC would lie between the PATL and TATL value. If such preventive solution were selected, due to the unavailability of curative actions, the flow in curative would remain higher than the PATL value, which would correspond to an overload on the grid element (situation for Outage 2 in the figure below).

Second preventive RAO#
Given the sequential nature of CASTOR’s search-tree algorithm, some constraints on curative CNECs that cannot be solved
by curative remedial actions are not seen by the preventive RAO.
After the curative RAO is complete, the user has the possibility
to run a second preventive RAO.
The differences with the first preventive RAO are that, in this run:
all CNECs are optimised, whatever their state;
automatic remedial actions that were selected in the automaton perimeter are supposed activated, in order for the preventive RAO to focus on constraints that cannot be solved by automatons;
curative remedial actions that were selected in the curative perimeter are supposed activated*, in order for the preventive RAO to focus on constraints that cannot be solved by curative actions.
* It is possible to re-optimise curative range actions during second preventive RAO using this parameter.
